Vou te passar apenas um apanhado geral, suficiente para entender os princípios que quero demonstrar nesse post. Se eu tiver uma oportunidade, mais adiante eu dedicarei um post apenas para tratar deste tópico.
Pois bem, uma interrupção é um mecanismo que permite o microcontrolador responder a um evento o mais rápido possível, sem ter aguardar até um momento no código onde o programa verifica se o respectivo evento ocorreu.
Imagine por exemplo que o seu projeto tenha um botão e que o laço loop() é responsável por verificar se este botão foi pressionado para então acender ou apagar uma luz. Mas dentro desse mesmo loop o programa é responsável por mandar uma sequência de dados para um periférico, um processo que pode levar alguns milisegundos. Agora vamos dizer que o usuário pressiona o botão exatamente enquanto o microcontrolador está enviando os dados para o periférico. Há a possibilidade real de que o loop() não irá detectar o botão pressionado, fazendo com o usuário tenha que pressionar o botão outra vez. Isso diminui a experiência do usuário com o sistema, o que pode te custar algumas estrelas nas resenhas no site de vendas do seu produto.
A interrupção, como o próprio nome diz, interrompe o microcontrolador dizendo: ocorreu um evento que precisa ser registrado imediatamente. Assim, no nosso exemplo, mesmo que o usuário pressione o botão num momento em que o sketch não está checando a porta, o evento não será perdido e o programa terá a oportunidade de responder conforme necessário.
O uso de interrupções não só é mais eficiente, como também permite liberar o processador para executar outras atividades enquanto espera que um evento ocorra. Notando que nesse contexto um evento pode ser tanto como um sinal lógico externo ocorrendo em algumas portas específicas do Arduino, ou eventos internos, como temporizadores, watchdog, comunicação serial, etc. Para os eventos externos a detecção pode ocorrer pela presença de um sinal lógico 0, 1 ou na ocorrência de transições do sinal de 0 para 1 (rising), de 1 para 0 (fall). E só para mencionar, no Arduino existem 26 interrupções distintas, duas diretamente por hardware e as outras internas. Outras variantes dos chips AVR podem ter mais portas de hardware habilitadas para interrupções.

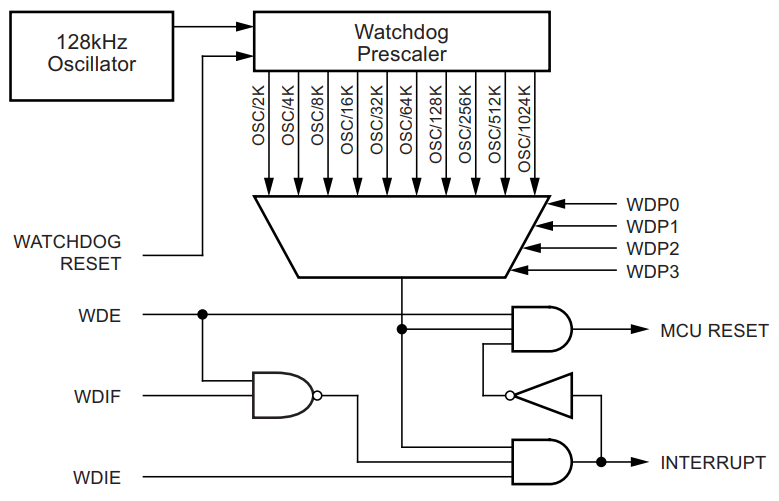
Watchdog é uma funcionalidade disponível em praticamente todos os microcontroladores e permite que este seja reiniciado nos casos em que o programa trave ou entre em um loop infinito. E como detectar se o microcontrolador travou e não consegue rodar nada? Aqui vale mais uma analogia. Lembra nos filmes quando o herói, já nas últimas, está prestes a ser atacado, e tira o pino e segura uma granada, aguardando apenas a morte para levar os vilões junto com ele? Isto é o chamado ‘gatilho do homem morto‘ (em inglês “dead man’s switch”). Aqui o mesmo conceito se aplica. O watchdog é constituido de um oscilador e um contador que ao atingir um limite, envia um sinal de reset ao processador. A chave é incluir no sketch do seu projeto uma instrução para zerar esse contador antes do contador chegar nesse limite. Se por algum motivo isso não ocorrer, o watchdog é acionado, o que dependendo de como foi configurado pode reiniciar o microcontrolador, ou gerar um sinal interno de interrupção, ou os dois. Esse contador pode ser zerado a qualquer momento através da instrução assembly WDR.
Isso é legal pois provê uma maneira de se recuperar de situações inesperadas como um crash do programa, ou um famigerado loop infinito. Mas é possível usar essa funcionalidade de outras formas também. Como a frequência do oscilador interno é conhecida (128KHz), e com o uso de alguns divisores internos (prescallers), é possível prever aproximadamente quanto tempo levará para o watchdog gerar a interrupção. Permitindo portanto utilizar o como um temporizador. Os possíveis valores para este temporizador são no ATMega 328p e 32u4: 16ms, 32ms, 64ms, 125ms, 250ms, 1s, 2s, 4s e 8s. Note que estes são valores aproximados pois este oscilador interno não é super-preciso.
Ao executar este sketch em um Arduino Uno, um LED propriamente conectado através de um resistor de 220Ω no pino 10 irá piscar a cada segundo, ficando meio segundo aceso e meio segundo apagado.
Use o serviço de emulação de kits de microcontroladores provido pelo site wokwi.com para rodar este sketch. Clique na imagem abaixo para acessar um simulador do Arduino Uno executando o sketch 002_PiscarLED_watchdog.ino. No site, basta selecionar o botão de play ( ) para executar o sketch.
) para executar o sketch.